
Brainsight NIBS Robot
| For over a decade, we at Rogue Research have believed that in order for Non-Invasive Brain Stimulation (NIBS) to reach its full potential in both the research and ultimately the clinical domains, the challenge of consistency of application from user to user and from site to site needed to be addressed. While our Brainsight navigator has been a useful tool in planning and executing TMS and TUS experiments, consistency and efficiency in application has remained a challenge, particularly when targeting small regions. This is even more so when stimulating multiple sites (grids, multiple targets) as well as when part of a real-time experiment where the site of stimulation may be decided during the session. At Rogue Research, we have supported the efforts of Axilum Robotics since the introduction of their first robot and continue to do so today with their Cobot. This is advantageous when using established TMS system from different manufacturers. At the same time, we have introduced our next-generation TMS (Elevate TMS) which gives us the opportunity to look at the challenge with a new perspective where we can design both the robot and the TMS coil to yield a truly integrated system with new advantages. Starting from a clean sheet, safety and fit for purpose can be the priorities in all aspects of the design. We opted to design our own bespoke robot arm from the ground up rather than re-deploy a pre-existing serial robot arm. This gave us multiple advantages. |  |
Safety
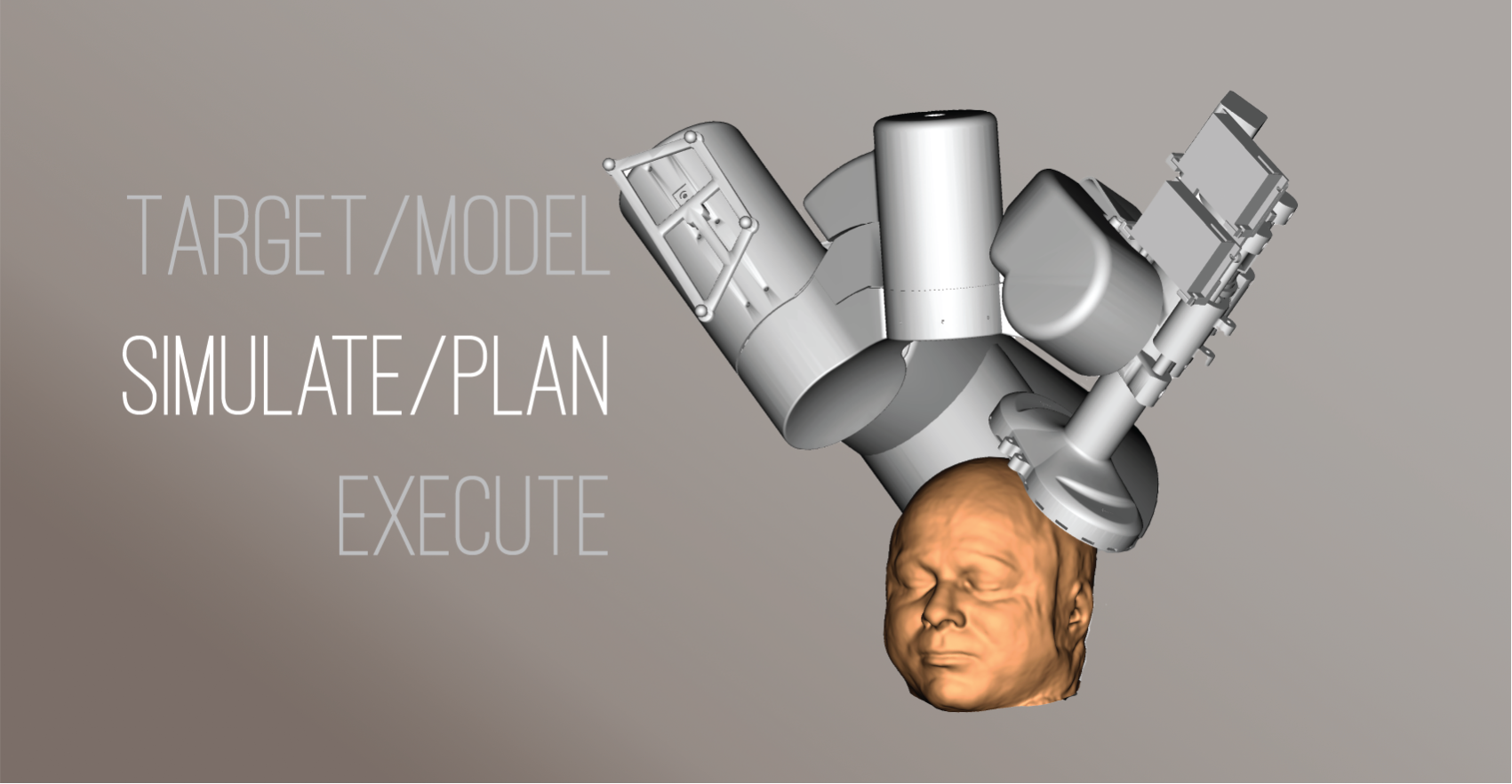
| When looking at the main task of the robot, it was clear that re-purposing an existing serial robot (the common industrial robot) would not give us what we wanted. The typical serial robot is designed to be at the centre of its workspace and facing away from itself. This is the opposite of the task at hand, which is to hold a tool (e.g. TMS, TUS) OVER a large object (human head) facing inwards towards the head. Furthermore unless constrained, the serial robot is capable of a wide range of motion, including theoretically within the volume occupied by the subject. We took a different approach. We designed an arm that is shaped as a 90deg arc that partially surrounds the head. The joints are arranged so the arm is physically constrained to the surface of a sphere surrounding the head. Only after the coil is hovering over the target do we set the orientation and then lower the coil to the head. Once in contact, the coil can be moved laterally over the head without having to completely withdraw it since it can hover over the scalp and move while making small adjustments to the height. This allows for safe and efficient motion. |
Reachability
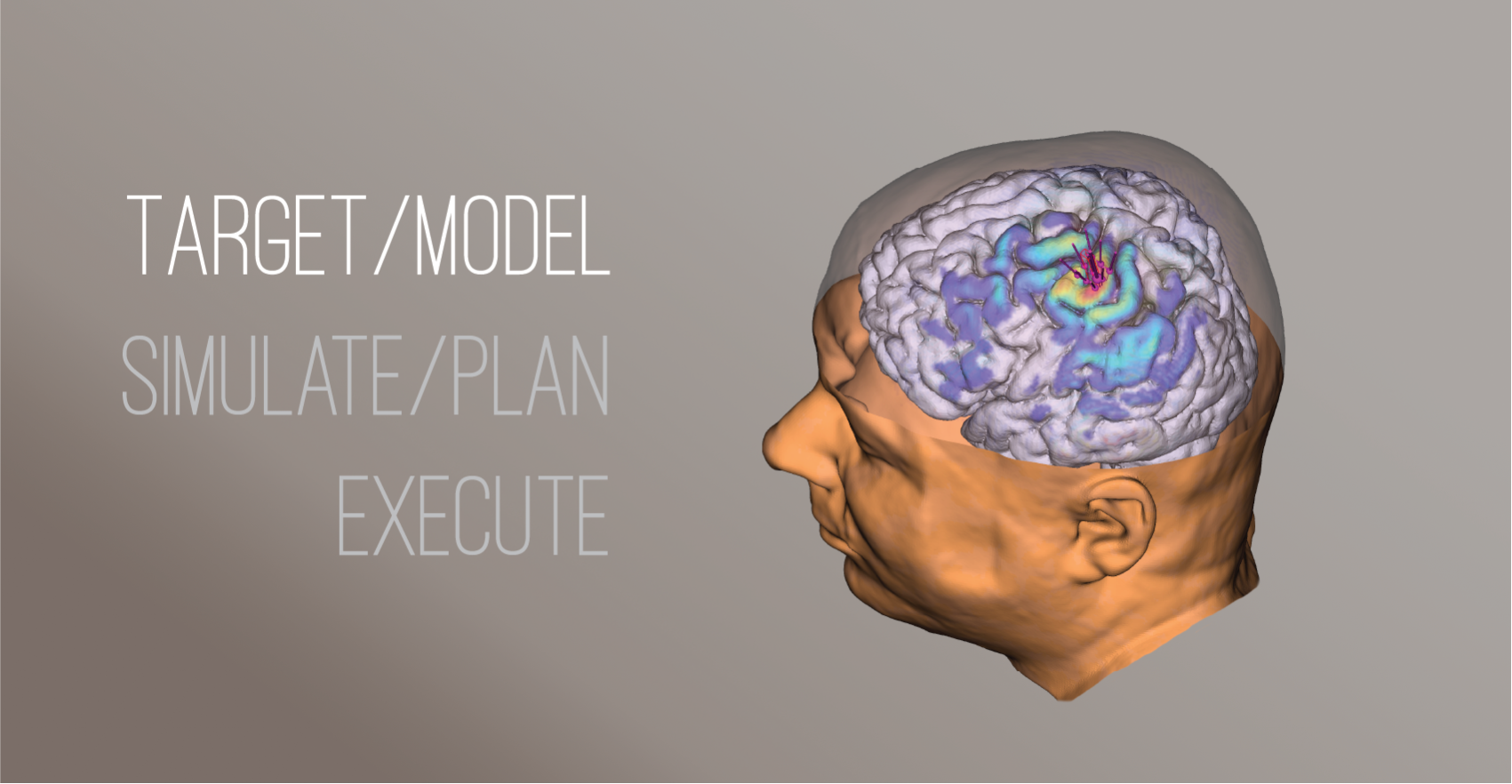
The robot is subject-centric in that it is designed to reach virtually any target without the subject needing to move. The concentric arcs can bring the coil to the optimal location to reach any brain target. |
Comfort
Comfort for the subject is one of the priorities of our design. We have incorporated a spring suspension system to manage the contact between the subject and coil/transducer face. The tool floats weightlessly supported by the springs, and by monitoring the amount of spring deflection (when in contact with the head), we can control how much pressure we want to apply. The coil is never rigidly held against the head: the subject is free to move their head and the spring and robot control will accommodate for the movement, first by simply allowing the spring to compress or decompress, and when needed, move the tool holder up/down to maintain the desired amount of pressure. |
Integrated with Brainsight
The Brainsight NIBS Robot is designed to work hand in hand with the Brainsight navigator. This allows us to use all the information and context within Brainsight for a seamless user experience. Brainsight is watching for head motion and making real-time corrections to the robot movement. Brainsight is determining how to be reach each target. Coupled with the Elevate TMS and our new TCP interface, you can monitor the coil position, decide on stimulation parameters, obtain the resulting EMG and tell Brainsight what to do next.
Automation
(played at 2x speed)